Cómo conectar un motor eléctrico de 380 a 220 (foto, video)
En la mayoría de los sistemas mecánicos modernos, una unidad eléctrica se utiliza para proporcionar movimiento recíproco de nodos.Esto naturalmente plantea la cuestión de cómo conectar correctamente el motor eléctrico.En este artículo, trataremos brevemente de considerar las variantes clásicas de inclusión de unidades a 380 y 220 V, circuitos de conexión de devanado de excitación, el uso de un arrancador, inhibición de oposición, trabajo en el sistema TN-S, así como casos específicos individuales.
DeLa posición de la ciencia oficial, el motor eléctrico se llama una máquina que convierte la energía eléctrica en la rotación mecánica del eje de transmisión debido al campo magnético de inducción.Este último se lleva a cabo a expensas del contacto de dos devanados: un devanado fijo y un rotativo rotativo.Un efecto de transformación que acompaña integralmente es la liberación de calor, que es particularmente notable en los motores potentes (hasta 45 kilovatios o más).
La clasificación de las máquinas, generalmente distingue dos grandes grupos, diferentes del tipo de corriente eléctrica utilizada para la alimentación: motores de corriente continua y corriente alterna.
El primer grupo se divide en los siguientes tipos:
Colector.Clase de máquinas en las que la cadena de rotor y estator está bloqueada graciascepillo de recogida de nudo (SHCHU). Tales se usan, por ejemplo, en un taladro, y el pozo en sí es el sitio de construcción más débil. Los motores de este grupo también se dividen en motores con autoexcitación independiente (paralelo, secuencial, mixto);
Gratis. Como se desprende del nombre, en los autos de este tipo no hay SHCHU problemático, y la organización de la cadena se produce con la ayuda de llaves electrónicas y el sensor de posición del rotor.
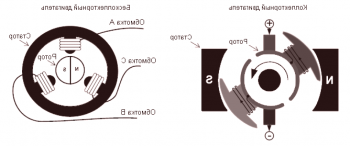
La diferencia de principio entre estos dos tipos de motores de CC se puede ver en la figura:
Diferencias en el motor del colector con respecto al mamparo
En ausencia de un eje, en la segunda variante, los devanados se ubican en los polos del estator y los imanes permanentes - en el rotor.
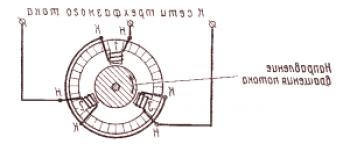
Los motores de corriente alterna de 220 o 380 V se utilizan para alimentar la corriente periódica alterna. La clasificación de estas máquinas es más ramificada, tiene en cuenta la frecuencia de rotación del campo magnético del estator y el rotor, así como la estructura de fase de la corriente.
En el primer caso, los motores se dividen en síncronos (velocidad de rotación del campo del estator, nivel del rotor) y asíncronos (la velocidad del rotor es menor). Por el número de fases, los motores de CA son monofásicos y multifásicos (trifásicos).
Esquemas clásicos
emita una corriente alterna de la frecuencia industrial (Hz), comience a considerar la conexión de los motores de manera razonable para esta situación.
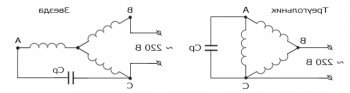
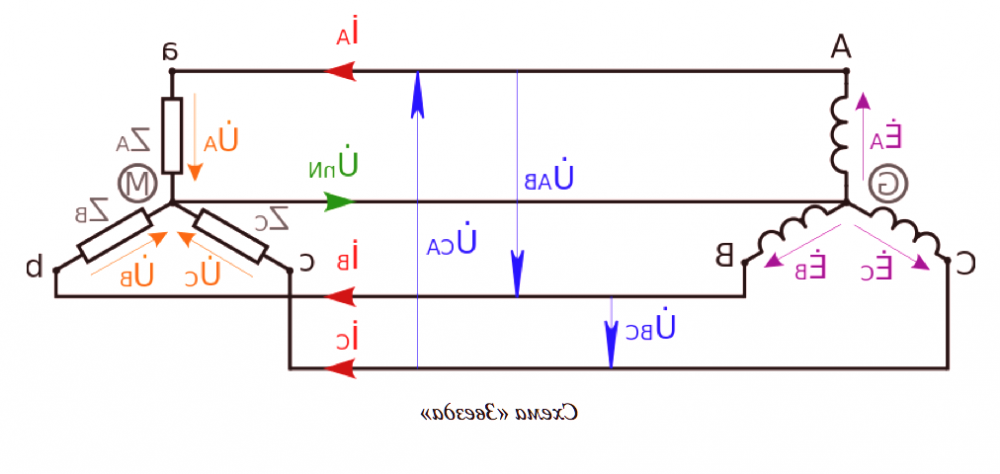
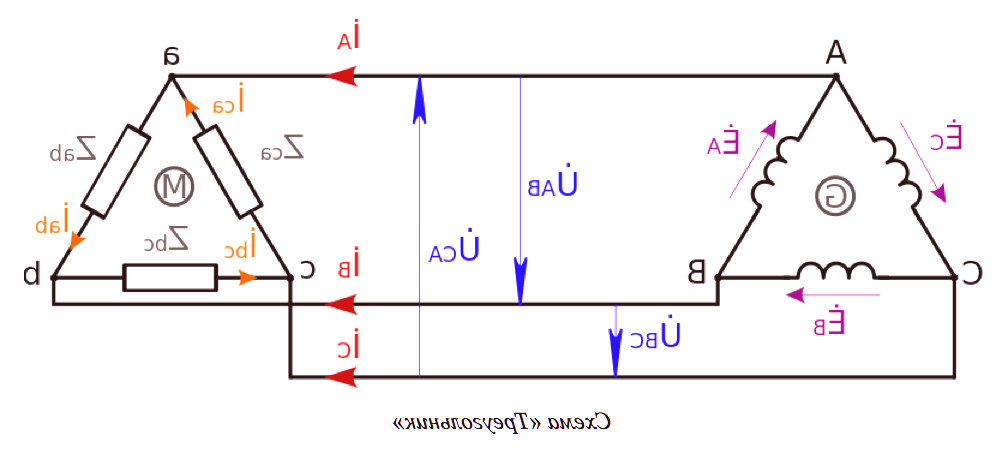
Las variantes clásicas son líneas de transmisión de plantas /plantas generadoras de energía (TES, CHP, HES, NPPs) con un voltaje final de consumo de 380V (trifásico) o 220V (monofásico). Los primeros usosEquipos industriales o energía para condiciones domésticas (rectificado, carpintería, máquinas herramienta para cortar metales, etc.).En tal horario, los motores eléctricos se conectan correctamente al esquema de una estrella o triángulo.
La estrella proporciona un arranque suave del motor, pero alcanza la máxima potencia para no salir."Triángulo", por el contrario, le permite ingresar la capacidad del pasaporte (esto es una vez y media más).Las corrientes de arranque pueden causar daños en el aislamiento, especialmente en motores potentes, de hasta 45 kilovatios.
La elección del esquema de conexión depende no solo de los parámetros de la red o la potencia del motor, sino también de la disposición de su bloque de terminales, las características del arrancador.Las patas de los contactos se pueden calcular en cualquiera de los circuitos o en uno de ellos, como lo demuestra la marca en la placa característica.
Un motor monofásico (220V) de su "contraparte" se diferencia en que tiene en su estator no tres sino un devanado de trabajo.Como resultado, no hay cambio de fase, y el inicio no se produce cuando la tensión se aplica al terminal.Devanado externo requerido - inductivo (resistencia) o capacitivo (condensadores).
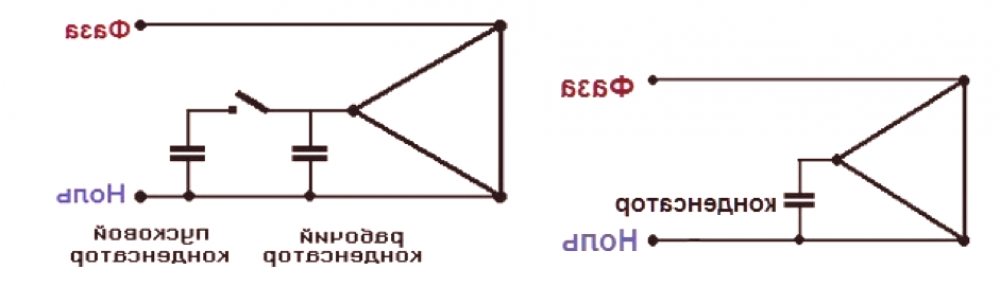
Activación de la interrupción para 380 220
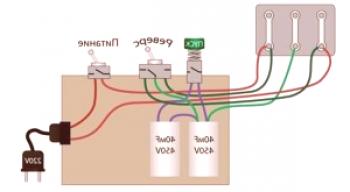
También hay una opción donde un motor trifásico está disponible a 380 V y 45 kW, pero un circuito de red monofásico (220V).Tendrá que usar solo una fase aquí, y usar los bloques de capacitores (capacitores) para la puesta en marcha y la operación.
El primer esquema es adecuado para aquellos motores con 220 V, cuya potencia no exceda de 1,5 kW, es decir, su trabajo comienza sin carga.De lo contrario tienes que usarlo.Rama paralela para aumentar el par. La conexión es a través de un interruptor de dos posiciones. Si aplica un interruptor adicional que conecta un capacitor a una fase o a cero, dependiendo de la posición, puede organizar un arranque de marcha atrás del motor a partir de una interrupción de 220 V.
La desventaja de este esquema, especialmente para el segmento de masa (hasta 3 kW), es el alto costo de los condensadores, que, además, solo participan en el momento de la puesta en servicio. Es conveniente utilizar elementos de acción constante que cambian de fase, por ejemplo, dinistores (diodos).
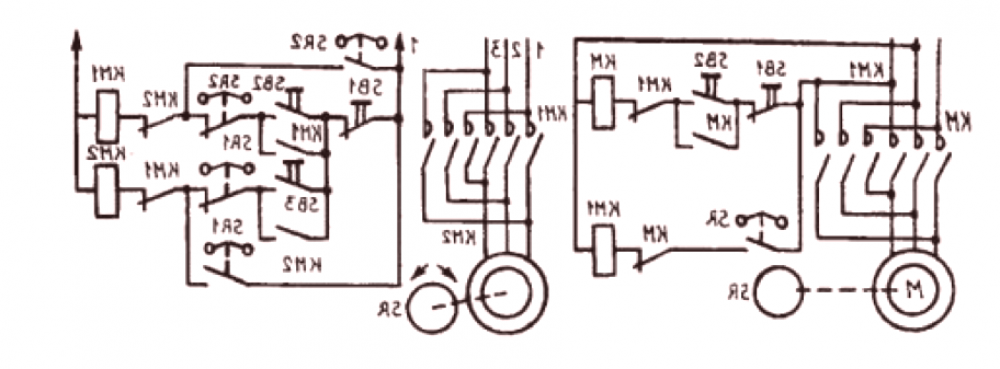
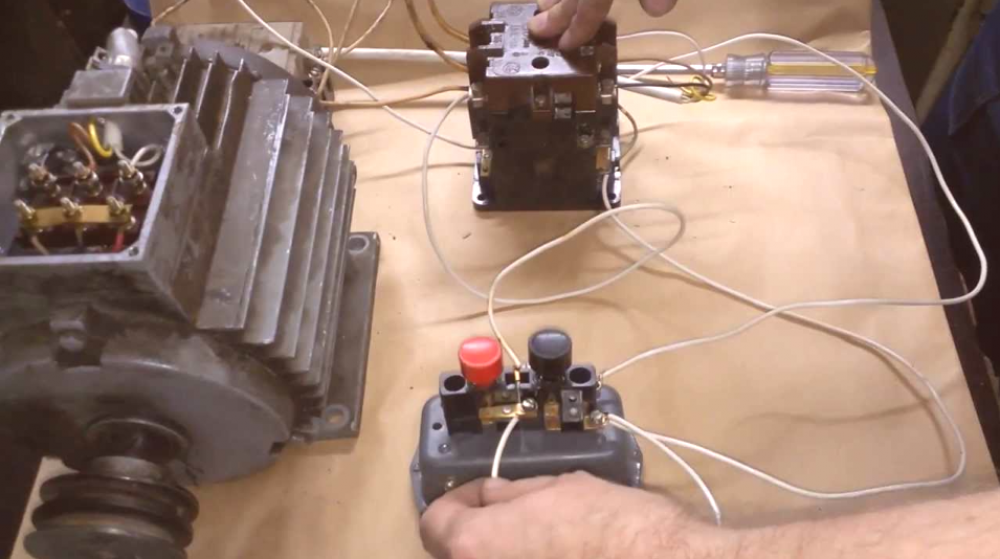
Utilizando un arrancador magnético
Para poder proporcionar un funcionamiento continuo en un solo circuito, arranque, parada, modo inverso y protección de los bobinados del motor y la propia cadena, será necesario utilizar un dispositivo de conmutación: un arrancador magnético. Este es un contactor, complementado por mecanismos auxiliares, por ejemplo, un relé térmico. La bobina magnética del arrancador puede tener un voltaje de 220 o 380 V, lo que le permite alimentar el motor desde una red con diferentes voltajes lineales.
Utilizando un arrancador magnético
Se puede usar un motor de arranque para organizar la conmutación de diferentes circuitos, lo cual es especialmente útil cuando se conectan dispositivos potentes, por ejemplo, 45 kW de motores. El principal problema en este caso es la presencia de corrientes de arranque colosales, que pueden afectar desastrosamente el estado de los devanados. Como resultado, el motor de arranque introduce suavemente un motor de 45 kW a través de Star y, en el momento adecuado, cambia el devanado al "triángulo".
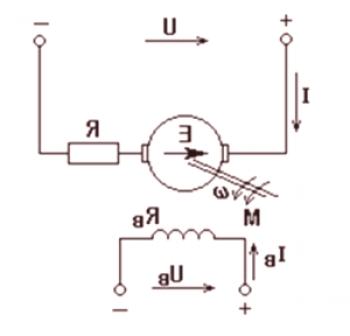
Motores de corriente continua (DTT)
El principio de los similares.La electrónica se basa en la Ley de Faraday para la inducción magnética.En el diseño y esquema de la inclusión de un motor de este tipo se prevé la presencia de anclajes y excitación de los devanados individuales (IV).Debido a ellos, una tensión de 220 o 380 V se filtra por separado.En este caso, la función del IP es ajustar la velocidad de rotación del eje.
Todos los DPT existentes se dividen en dos grandes grupos:
En imanes permanentes.Como regla general, tienen un cuerpo cilíndrico con un núcleo de anclaje.La ubicación de los imanes o el estator en el cuerpo del DPT (radial, anillo, tangencial), le permite dividirlo en subespecies separadas;
En electroimanes.Como es fácil de adivinar, en este caso, el papel de la cadena de excitación es jugado por un electroimán o, más simplemente, una bobina del núcleo y bobina.
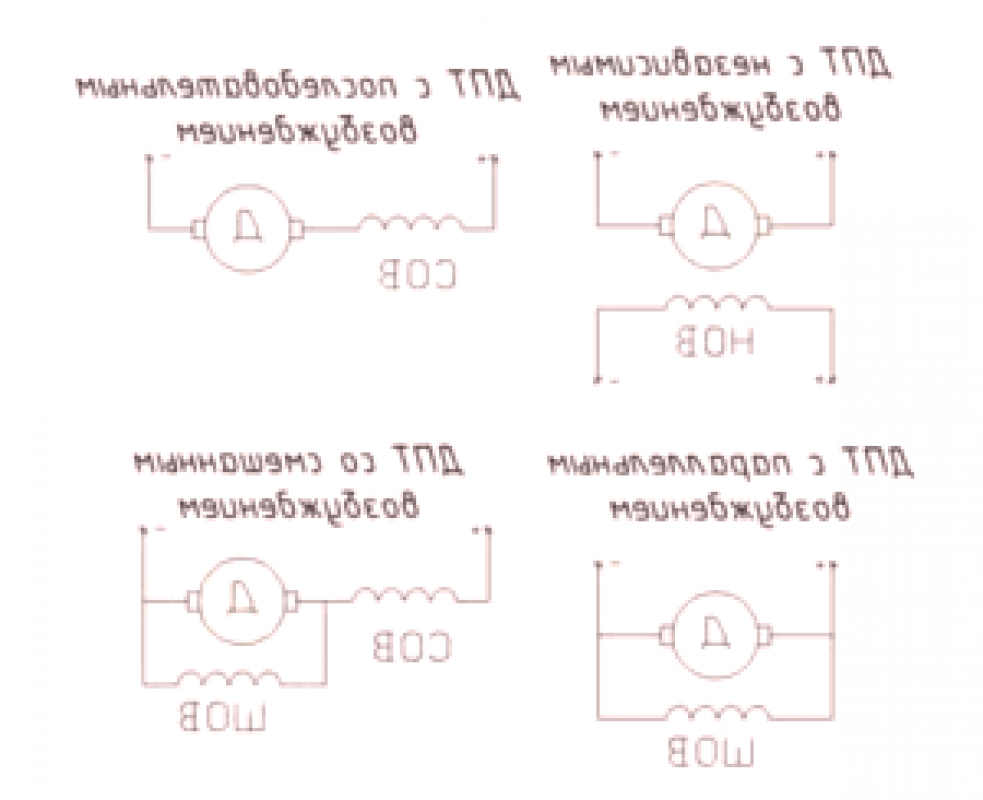
Exterior y constructivamente, estos TDT se asemejan a los modelos de corriente alterna, a pesar de que la potencia está lejos de los 45 kW y más:
Motores de excitación independiente.La fuente de la corriente de arranque es un sitio de terceros, por ejemplo, un rectificador;
Motores con secuencia IV.Para tal cadena se caracteriza por una conexión consistente de ambos devanados, y, en consecuencia, la igualdad de las corrientes en ellos, lo que lo distingue de otras modificaciones;
Motores de corriente continua con IP paralela.El esquema es similar al anterior, pero es igual al voltaje;
Motores con IP mixta.Esto se caracteriza por la aplicación simultánea de un devanado de excitación paralelo y secuencial.
La ventaja de tales máquinas es que las dimensiones más compactas en relación con los análogos para la corriente alterna de 220 o 380 voltios, facilitanReglamento y lanzamiento. Esto permitió que la plataforma Arduino se utilizara como sistemas de control, a través de los cuales esquemas de automatización simples y simples pueden estar incluso alejados de la programación a los usuarios.
Arduino
Arduino es una herramienta compleja para crear esquemas de gestión y consta de las siguientes partes:
Unidad de programa. El entorno de desarrollo de shell o firmware de Arduino, a través del cual se compila y compila el programa;
Unidad de hardware. Este es un conjunto de tarjetas de PC Arduino, en las que se basa el circuito de control físico.
La ventaja de Arduino es que el sistema puede funcionar fuera de línea (directamente en el objeto de automatización) o conectarse a la PC a través de USB, Bluetooth, Wi-Fi, etc. El sistema es perfecto para Experimentos caseros, por ejemplo, para crear un modelo de automóvil con control de software. Esto significa que el modelo listo se moverá no bajo la influencia del control remoto, sino debido a los comandos que se pusieron en la memoria del bloque. Un ejemplo interesante es la plataforma motriz con un servomotor de corriente continua y una placa Arduino Mega 2560, cuyo trabajo se puede ver en el siguiente video:
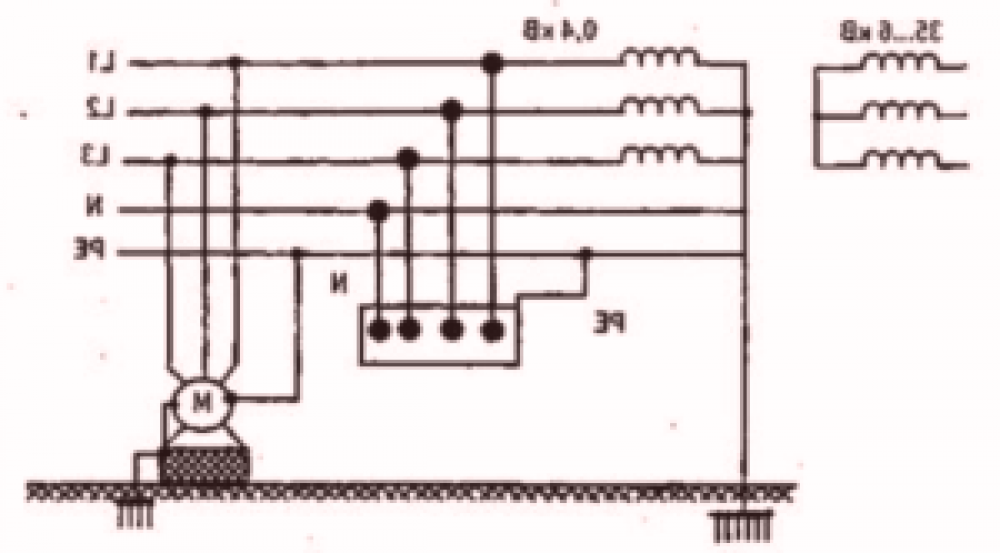
Tipo de conexión a tierra TN-S
En cada directriz para sistemas de suministro de energía, se establece que el motor eléctrico debe estar conectado a la seguridad de la descarga. Este papel lo juega la conexión a tierra, cuyo esquema clásico de formación en Rusia es TN C o TN S. Para ambos, el rasgo característico es la unificación del neutro y la rama de conexión a tierra. Es decirpara colocar la línea TNC trifásica a 380 V, es necesario utilizar un cable de cuatro hilos (3 fases y un cero /tierra), y para una fase a 220 V es de dos hilos (fase y cero).
Hoy en día, las realidades avanzan gradualmente hacia un sistema TN S europeo más caro, caracterizado por una separación de cero (N) y líneas de conexión a tierra (PE).En detalle, esto significa la aplicación de redes trifásicas de cables de cinco hilos (fases - A, B, C, cero - N y conexión a tierra - PE), y para 220V (monofásico) - tres núcleos (A, N, PE).En este caso, el cable de conexión a tierra se emite a través de la línea PE, dejando cero TN S gratis para equipos adicionales (iluminación, electrodomésticos, etc.).
Pregunta de frenado
La conexión y activación de un motor a 220 V o un análogo trifásico es solo uno de sus modos de operación.Otro no menos interesante es frenar o parar.En este caso, el proceso se acompaña de la transformación de la energía cinética en un campo eléctrico.El hecho es que si simplemente se apaga a 45 kW con una velocidad de 3000 rpm, la inercia girará por algún tiempo.Si necesita una parada "instantánea", tendrá que usar esquemas de control especiales.
En la práctica, se utilizan cuatro métodos básicos de frenado: recuperativo, reostático, dinámico y de exclusión voluntaria.Cada uno de ellos tiene sus propias ventajas y desventajas.Por ejemplo, el frenado dinámico se produce debido a la conexión de una bobina de estator con una red de CC, que automáticamente hace que el campo electromagnético sea estático en lugar de rotar.Eso es todole permite ajustar el par de frenado, pero provoca una cantidad significativa de liberación de calor. El frenado mediante el opt-in se realiza a costa del reverso de los devanados de excitación. El resultado son fuertes momentos de frenado, pero también un mayor riesgo de daños debido a grandes corrientes. El frenado opcional no se aplica a altas frecuencias y capacidades, como DC.


 Motores de excitación independiente.La fuente de la corriente de arranque es un sitio de terceros, por ejemplo, un rectificador;
Motores de excitación independiente.La fuente de la corriente de arranque es un sitio de terceros, por ejemplo, un rectificador;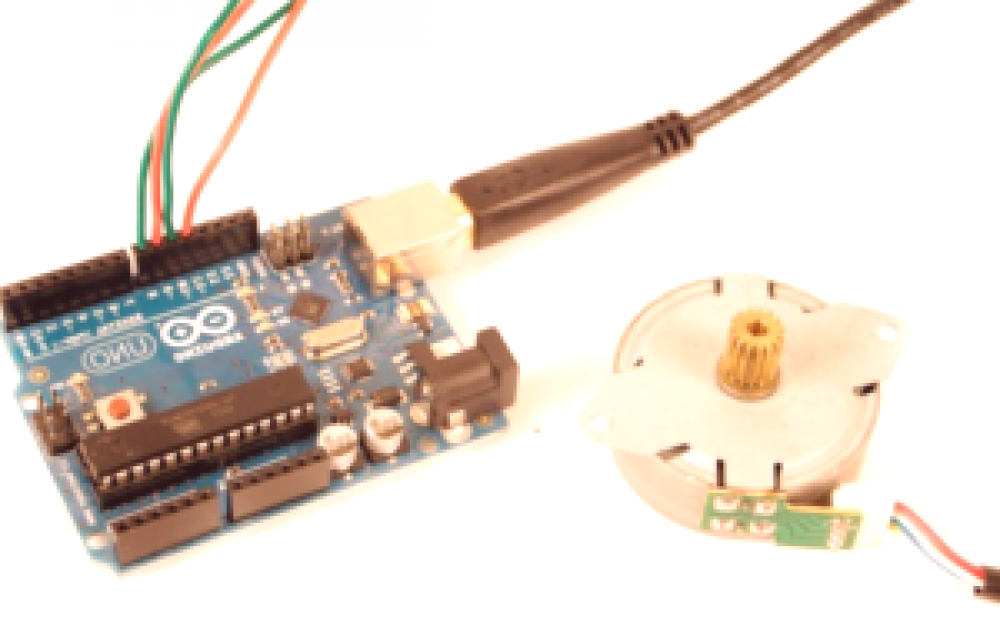
 En cada directriz para sistemas de suministro de energía, se establece que el motor eléctrico debe estar conectado a la seguridad de la descarga. Este papel lo juega la conexión a tierra, cuyo esquema clásico de formación en Rusia es TN C o TN S. Para ambos, el rasgo característico es la unificación del neutro y la rama de conexión a tierra. Es decirpara colocar la línea TNC trifásica a 380 V, es necesario utilizar un cable de cuatro hilos (3 fases y un cero /tierra), y para una fase a 220 V es de dos hilos (fase y cero).
En cada directriz para sistemas de suministro de energía, se establece que el motor eléctrico debe estar conectado a la seguridad de la descarga. Este papel lo juega la conexión a tierra, cuyo esquema clásico de formación en Rusia es TN C o TN S. Para ambos, el rasgo característico es la unificación del neutro y la rama de conexión a tierra. Es decirpara colocar la línea TNC trifásica a 380 V, es necesario utilizar un cable de cuatro hilos (3 fases y un cero /tierra), y para una fase a 220 V es de dos hilos (fase y cero).