El motor eléctrico de hoy es la base de la mayoría de los complejos de elevación y transporte y procesamiento. Una de las formas de su trabajo suave es el control vectorial de un motor asíncrono, que convierte la energía eléctrica en mecánica: la rotación del eje de transmisión y sus mecanismos asociados. ¿Qué es, qué principios se utilizan en esto, tratar de averiguar más a fondo.
¿Qué es un motor asíncrono?
Antes de pasar al modelo, los algoritmos y los sistemas de control de la unidad eléctrica, debe saber exactamente qué representa. Esto le permite identificar en su circuito los momentos que pueden usarse para organizar el cambio suave de las características clave (frecuencia /velocidad, voltaje). En consecuencia, es posible determinar los parámetros del controlador, desarrollar tarjetas tecnológicas para su colocación en el gabinete y mantenimiento.
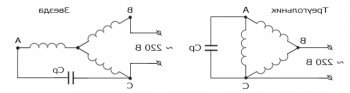
El funcionamiento de cualquier motor asíncrono se basa en una violación de los devanados de contacto del campo magnético durante el suministro de electricidad desde el gabinete de control. Surge en el estator, la parte estacionaria del motor, que consiste en un núcleo anular (núcleo magnético), que se recolecta de placas metálicas individuales. Cada uno de ellos tiene surcos concéntricos en el interior de los anillos, que, cuando están conectados, forman surcos longitudinales. Sirven para enrollar un alambre, un componente de la base.devanado del estator
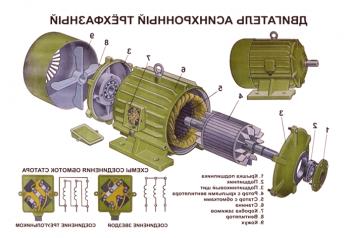
Además, el motor asíncrono tiene una parte móvil, un rotor acoplado a un eje motor. También tiene un núcleo en forma de placa con ranuras, pero ya en el exterior. En lugar de alambre, se utilizan varillas de cobre, que están cerradas por los bordes de las placas (esta variante del motor se denomina rotor cortocircuitado).
Debido a que las frecuencias de rotación del campo magnético del estator y el rotor difieren, en los devanados de este último por inducción, se induce la corriente eléctrica. A su vez, induce la fuerza electromagnética que impulsa el rotor (rotación). La diferencia de frecuencia se suele llamar deslizamiento. Su valor es de aproximadamente 2 ... 10%.
¿Cómo puedo controlar la velocidad del motor?
Es obvio que el motor está en operación normal desde la red del cable eléctrico) tiene una velocidad estándar, frecuencia de rotación. Esto limita su uso directo, obligando a aplicar diferentes mecanismos de engranajes para reducir la frecuencia a la requerida. Pero incluso entonces no hay posibilidad de cambiar dinámicamente las rotaciones, y con ellas, la potencia, la alimentación, porque aún permanecen las frecuencias fijas en la salida del motor y la caja de cambios. Para expandir los marcos existentes, se utilizan diferentes formas de controlar el motor asíncrono (frecuencia, pulso, fase, etc.), que se pueden dividir en dos grandes grupos:
Control de motor asíncrono
A diferencia del control vectorial escalar, es precisamente la capacidad de realizar un control de excitación (flujo). De hecho, el motor asíncrono se representa como un motor de CC, que tiene bobinado independiente entre sí. Este enfoque nos permite crear un modelo matemático similar del sistema controlador.
Formas y esquema de control de vectores
Todos los sistemas existentes de control vectorial del funcionamiento del motor se pueden dividir en dos grupos:
Los sistemas de sensores son más complejos, ya que la precisión del control es 1: 10000. Los sistemas de identidad operan a un nivel que no exceda de 1: 100. Todas las frecuencias, teniendo en cuenta el nivel de obstáculos creados, se instalan en armarios centrales o separados.
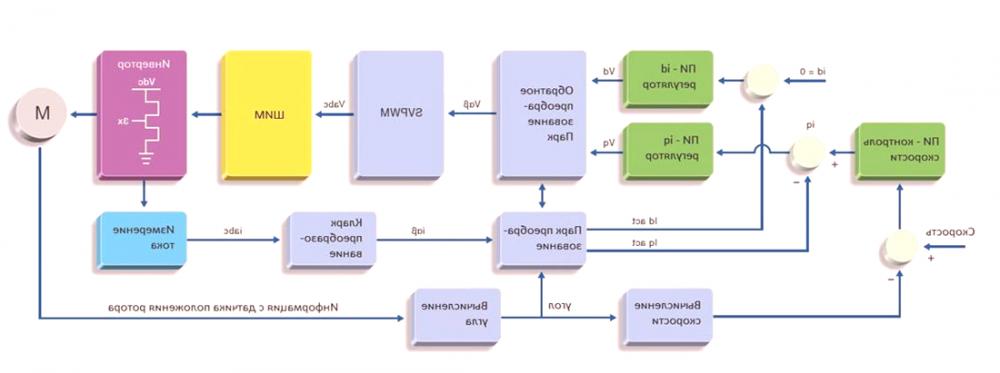
Si imaginas todo lo dicho anteriormente como un diagrama visual, entonces saldrá algo como esto:
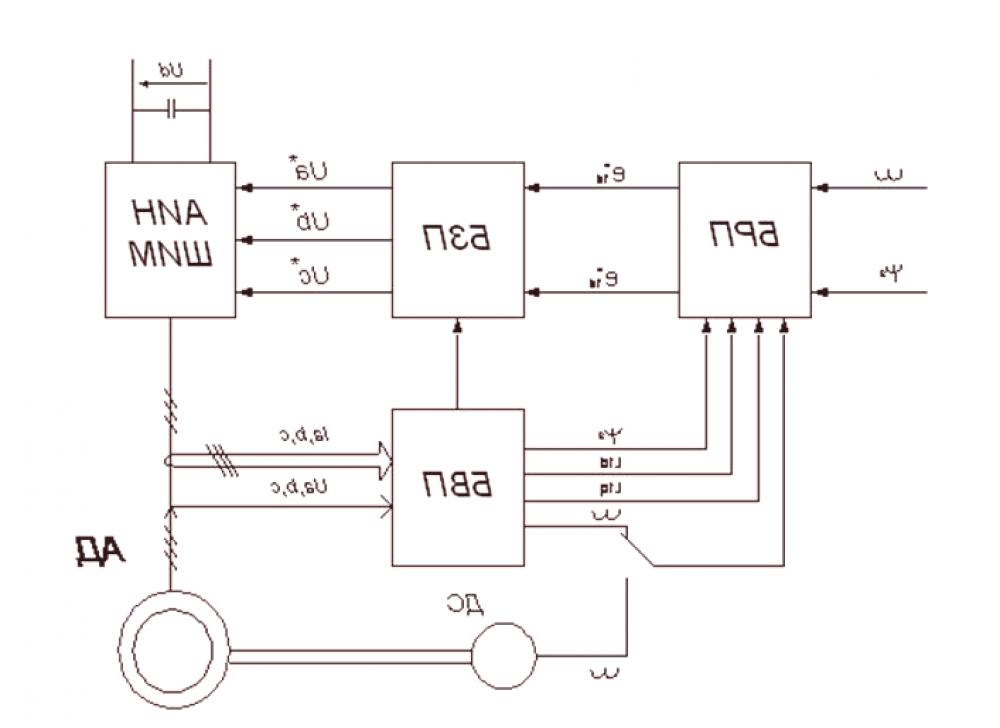
Aquí puede ver los siguientes componentes clave del sistema de gestión:
- HELL - de hecho, motor asíncrono (objeto de control);
- BPP - bloque lógico de reguladores para las ecuaciones de variables;
- BVP es la unidad lógica responsable del cálculo de variables;
- BZP - bloque que define los valores de las variables;
- DS - sensor de velocidad en el eje del motor;
- AIN PWM - bloque de modulación de amplitud-pulso /ancho de pulso.
El hecho de que el esquema esté representado en forma de bloques, en la práctica, son solo elementos paramétricos del circuito de control, que se implementa en el microcontrolador. En consecuencia, el propio controlador y los actuadores que lo acompañan están montados en un armario eléctrico. Para su correcta instalación se desarrolla una tarjeta tecnológica.
Control de los controladores de frecuencia
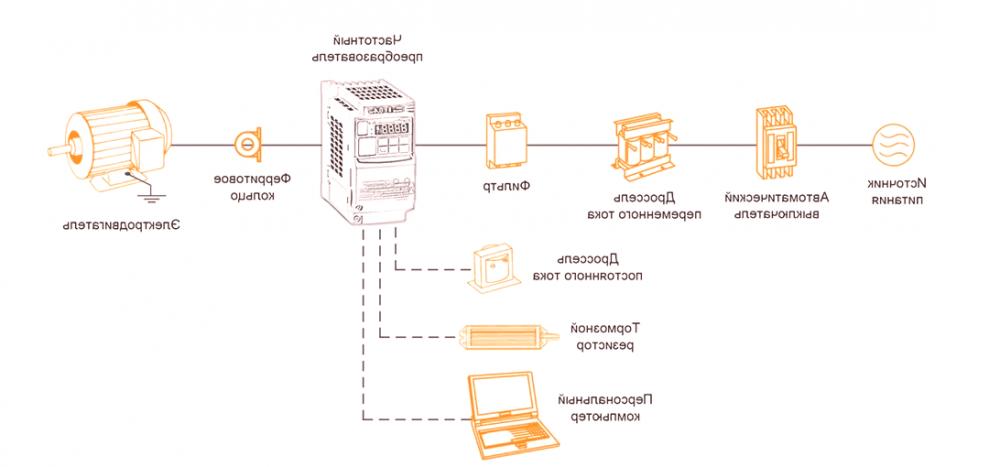
Los convertidores modernos de corriente /voltaje operan en versiones escalares y vectoriales, utilizando modelos matemáticos paramétricos implementados en el código de programa del microcontrolador incorporado. Las frecuencias de tipo electrónico operan en circuitos de puente de tiristores e incluyen los siguientes componentes principales:
- Rectificador: un puente de tiristores o transistores que convierte la corriente alterna en una constante;
- Inversor: bloque AIM /PWM, que funciona según el principio inverso, es decir, convierte una corriente continua en una variable.
Dado que tal transición de una manera u otra afecta la forma del gráfico de voltaje de salida, el controlador de bloque /controlador de frecuencia puede usar el circuito de choque y los filtros especiales de EMC. Estos últimos se utilizan para reducir la intensidad de la interferencia electromagnética.
Control de los controladores de frecuencia
controlador centralProporciona control paramétrico del circuito, así como tareas auxiliares, por ejemplo, diagnósticos de estado, protección de sobrecarga, etc. El convertidor de frecuencia se monta generalmente en un gabinete separado para reducir la interferencia electromagnética al equipo.
En general, el control vectorial de un motor asíncrono, organizado por un controlador moderno y convertidores de frecuencia, permite una regulación suave de las variables clave, así como los parámetros secundarios del funcionamiento del equipo.Debido a la presencia de interferencias electromagnéticas durante el funcionamiento, los calentadores generalmente se colocan separados del gabinete eléctrico principal.