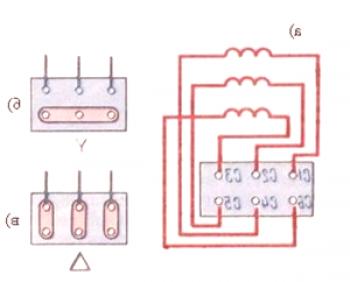
Hay varios tipos posibles de construcción de motores eléctricos, que operan desde una fuente de voltaje constante.El principio de su funcionamiento es el mismo, pero las diferencias están en la conexión del devanado de excitación (IV) y ancla (I).
El nombre del motor fue emitido por un motor de CC con excitación paralela debido al hecho de que sus devanados I y OH están conectados entre sí de esta manera.Un motor eléctrico de este tipo proporciona los modos necesarios, superando los productos de tipos sucesivos y mixtos cuando requiere una velocidad casi constante de su funcionamiento.
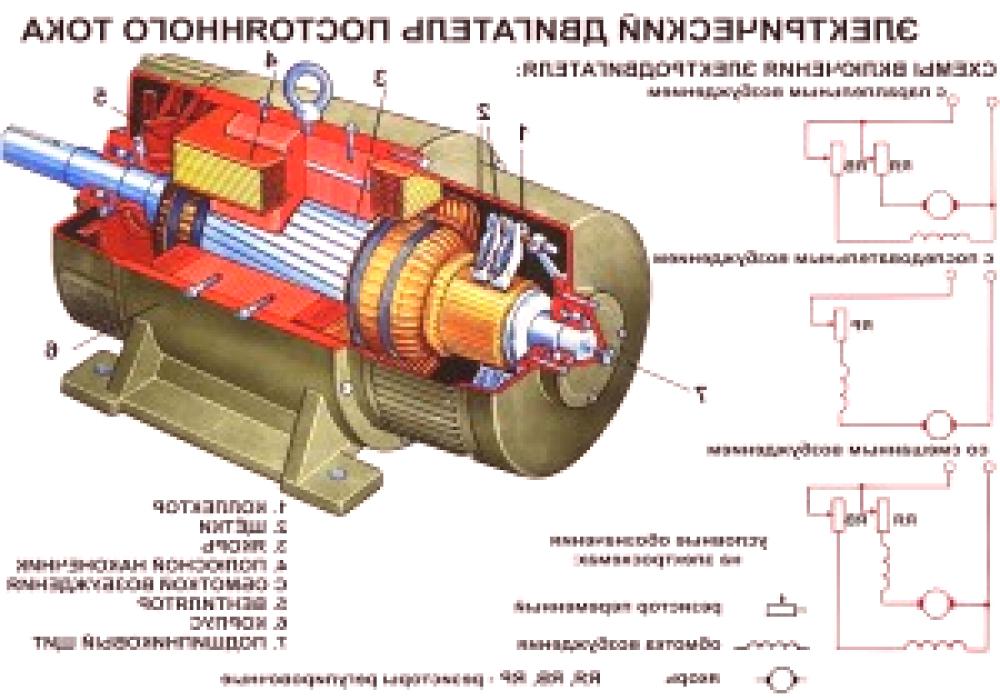
Construcción del motor y su área de aplicación
El diagrama del motor eléctrico del tipo considerado se muestra a continuación.
Se deduce de
- que la corriente total consumida por el motor desde la fuente es
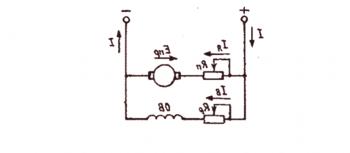
El esquema de principio del motor de CC con excitación paralela
, es I = IA + IV, donde IA, IV - corrientes a través de un ancla, devanado de excitación, respectivamente; - Al mismo tiempo, la IP es independiente de la IA, es decir, no depende de la carga.
El principio de funcionamiento de un motor eléctrico determina sus propiedades de tracción.El dispositivo se usa cuando el arranque no requiere un par alto, es decir, cuando los modos de funcionamiento de los mecanismos de accionamiento no implican la creación de grandesiniciar cargas Esto es típico para máquinas y ventiladores.
Para uso práctico, parámetros de tracción útiles de tales mecanismos auxiliares como
- estabilidad del trabajo bajo fluctuaciones de carga;
- alta rentabilidad debido al hecho de que el IA no fluye a través del IP.
El inicio en un momento insuficiente se proporciona al cambiar a un circuito de tipo mixto.
Comportamiento del electromotor en el cambio de carga
La característica mecánica muestra la estabilidad del motor eléctrico en una amplia gama de cambios de carga, describiendo la dependencia del par generado por el motor de propulsión de la velocidad de funcionamiento del eje.
Las características de tracción del mecanismo de este tipo permiten guardar la magnitud del momento con cambios significativos en el número de revoluciones del eje. Normalmente, los parámetros de tracción de la unidad deben garantizar que este parámetro no se reduzca en más del 5%. Un estudio simple demuestra que los parámetros de los frenos debido a la reversibilidad de los procesos son similares. Estas disposiciones se aplican también al caso de agitación mixta.
En otras palabras, para tal motor se caracteriza por una característica rígida. Este tipo de trabajo se considera una ventaja importante de la unidad del tipo en cuestión.
Variedades de enfoques para ajustar la velocidad de rotación
 El principio del funcionamiento paralelo de los devanados proporciona un arranque suave junto con una gran variedad de cambios en el número de revoluciones del eje durante el trabajo con la ayuda de reóstatos. También proporcionan un arranque normal del motor con limitación de corriente.
El principio del funcionamiento paralelo de los devanados proporciona un arranque suave junto con una gran variedad de cambios en el número de revoluciones del eje durante el trabajo con la ayuda de reóstatos. También proporcionan un arranque normal del motor con limitación de corriente.
Para unidades del tipo paralelo, se utilizan métodos de control de la velocidad de operación:
- del flujo magnético de los polos principales;
- resistencia del círculo de anclaje;
- se le alimenta por voltaje.
El objeto de influencia es el devanado de excitación, el devanado de un ancla, su voltaje de trabajo.
Un cambio en el flujo magnético se lleva a cabo con la ayuda del reostato RP sucesivo.Con un aumento en su resistencia, el IV pasa una corriente más pequeña, que se acompaña de una disminución en el flujo magnético.La manifestación externa de tal acción es el aumento en el número de giros en los que estoy inactivo.El estudio muestra que hay un aumento en el ángulo de inclinación de la característica.
El segundo principio se basa en la inclusión en la cadena de suministro de un ancla de un reóstato adicional de regulación en serie.Al aumentar su resistencia, la velocidad de rotación I disminuye, mientras que sus características mecánicas naturales adquieren una mayor inclinación.Debido a la inclusión sucesiva con el devanado principal del reóstato y una resistencia adicional, que disipa una potencia significativa, se observa una disminución notable en la rentabilidad.
El tercer principio está acompañado por una cierta complicación de las decisiones del circuito y requiere el uso de una fuente de energía regulada separada con la preservación de la posibilidad de una regulación separada.En el caso de su uso en condiciones reales, solo es posible reducir la velocidad de rotación del eje.
Motor de motor independiente
El motor de CC de excitación independiente implementa el tercer enfoque de la regulación y es interesante porque el IV y M se alimentan de diferentes fuentes, el esquemaSe presenta a continuación.
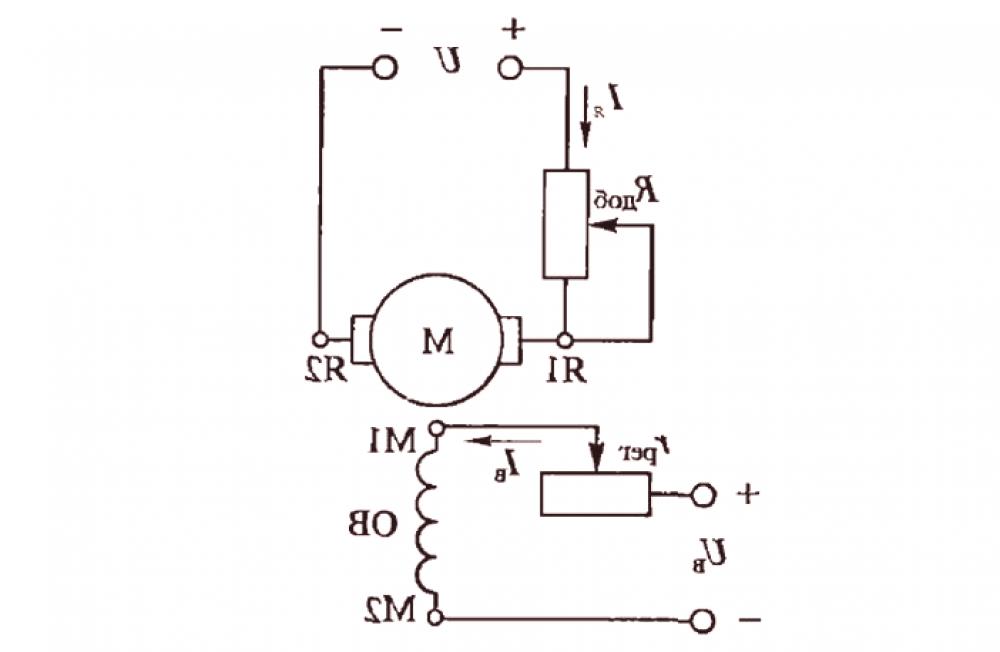
Devanado del motor eléctrico más simple de excitación independiente en paralelo
Para los motores en esta realización constructiva, la ecuación se establece sin cambios, y solo se cambia la tensión aplicada a M. Esto se acompaña de un cambio en el númeroRotación del eje al ralentí, pero la rigidez de las características de los cambios no experimenta.
El principio de funcionamiento de dicho ensamblaje debido al funcionamiento independiente de las dos fuentes es más complicado.Sin embargo, su aplicación proporciona beneficios tan importantes para la práctica como
- gestión económica suave de la velocidad de operación con gran profundidad;
- Arranque del motor a voltaje reducido sin reostato.
Si el inicio ocurre a un voltaje normal, el reóstato restringe el valor de i en.
El estudio muestra que el valor máximo del número de revoluciones está limitado solo por la resistencia M, y el mínimo son las condiciones para la eliminación del calor liberado durante el trabajo.
Las características en términos de consumo de energía y velocidad de operación del sistema de control se mejoraron en el caso de la inclusión sucesiva de varios reguladores de tiristores de M.Se utilizan diferentes métodos para establecer el número de revoluciones del eje y su estabilización en el proceso de mover varios mecanismos.Su característica común es la inclusión de un regulador de tiristor en el circuito de retroalimentación de frecuencia negativa.El lanzamiento de dicho ensamblaje requiere la implementación de procedimientos especiales.
Conclusión
El motor de excitación en paralelo es un mecanismo de accionamiento muy flexible yse puede utilizar en una gran cantidad de áreas donde no se necesitan grandes momentos al inicio. Tiene un circuito simple y confiable para ajustar la velocidad de rotación, es fácil de comenzar.