El motor asíncrono convierte la energía eléctrica en mecánica.Las características mecánicas del motor asíncrono, electromecánico y otros contienen información sin la cual su funcionamiento adecuado es imposible.
Este diseño es ampliamente utilizado en varias esferas de la vida humana.Sin ellos, el trabajo de las máquinas, los transportadores, las máquinas de elevación y transporte es impensable.Los motores de baja potencia son ampliamente utilizados en la automatización.
Dispositivo de máquina asíncrona
Dispositivo esquemático de la máquina asíncrona
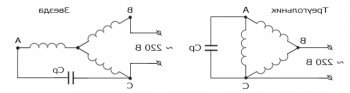
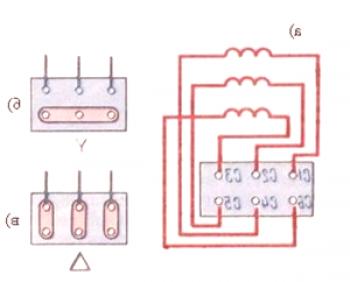
La máquina asíncrona clásica consta de dos partes principales: el rotor (móvil) y el estator (estacionario).Las tres fases separadas forman un devanado de estator.C1, C2 y C3 son el comienzo de las fases.C3, C4 y C5 son respectivamente los extremos de las fases.Todos ellos están conectados al conector del terminal de acuerdo con el esquema del triángulo de estrella, que se muestra en los dibujos a, b, c.El esquema se elige a partir de la revisión de los datos de pasaporte del motor y el voltaje de la red.
El estator crea un campo magnético que gira continuamente dentro del motor eléctrico.
El rotor distingue entre cortocircuito y forma de fase.
En la velocidad de giro en cortocircuito no está regulada.El diseño con él es más fácil y más barato.Sin embargo, el par de arranque es demasiado pequeño en comparación con las máquinas en las que se encuentra el rotor.AquíLa velocidad de rotación está regulada por la posibilidad de introducir resistencia adicional.
Principio de operación de la máquina asíncrona
Al suministrar el voltaje al devanado del estator, se pueden observar flujos magnéticos variables en cada fase, que se desplazan 120 grados entre sí. La corriente resultante gira en rotación y crea un EMF dentro de los conductores del rotor.
Aparece una corriente que, junto con la corriente resultante, crea un par de torsión. Esto hace que el rotor gire.
Hay un deslizamiento S, es decir, la diferencia entre la frecuencia de rotación del propio rotor n2 y la frecuencia del campo magnético n1 del estator. Primero, es igual a 1. Posteriormente, la frecuencia aumenta, la diferencia n1 - n2 disminuye. Esto conduce a una disminución en el par.
En ralentí, el deslizamiento es mínimo. Alcanza un valor crítico de Sqr cuando aumenta el momento estático. El exceso de Skr conduce al funcionamiento inestable de la máquina.
Característica mecánica
Como básico, ayuda a realizar un análisis detallado del motor eléctrico. Expresa la dependencia directa de la frecuencia de rotación del propio rotor en el momento electromagnético n = f (M).
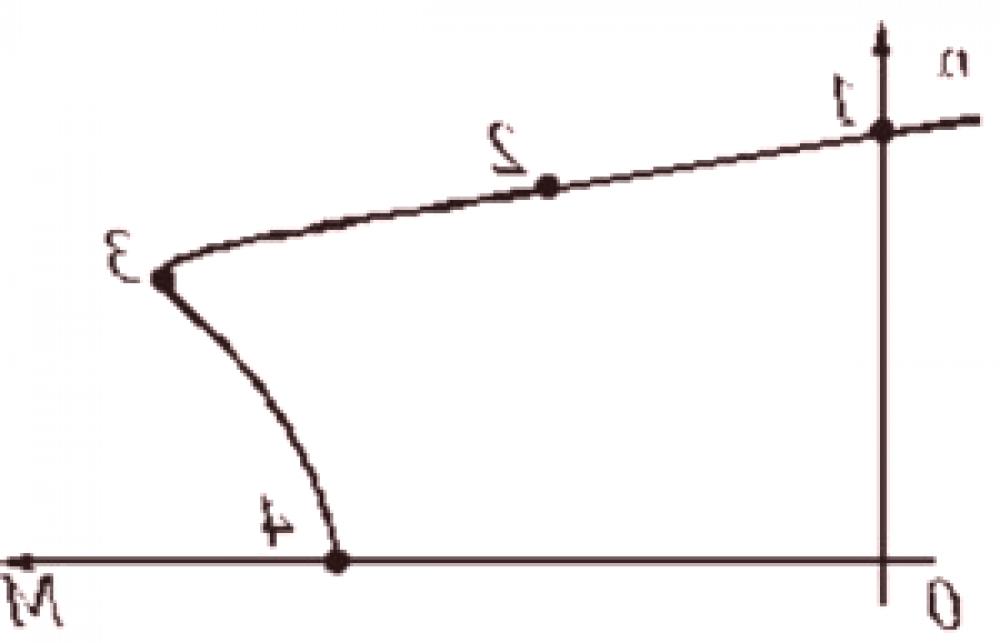 En el gráfico, es evidente que en el sitio 1-3 la máquina funciona de manera constante. 3-4 es el segmento directo del trabajo inestable. El trazo de ralentí perfecto corresponde al punto 1.
En el gráfico, es evidente que en el sitio 1-3 la máquina funciona de manera constante. 3-4 es el segmento directo del trabajo inestable. El trazo de ralentí perfecto corresponde al punto 1.
El punto 2 es el modo nominal de operación. Punto 3 - la velocidad de rotación ha alcanzado un valor crítico. Punto inicial Punto de sondeo 4.
Existen métodos técnicos para calcular y construir una característica mecánica teniendo en cuenta los datospasaporte
En el punto de inicio 1 n0 = 60f /p (p - el número de pares de polos). Como Mon y Mn son directamente las coordenadas del punto 2, el cálculo del par nominal se realiza mediante la fórmula: Mn = 9.55 * Pn /pn, donde Pn - potencia nominal. El valor de mn se especifica en el pasaporte del motor. En el punto 3 Mkr = Mn? Punto de partida en el punto 4 Ejecutar = Mn *? Inicio (valor?,? Inicio - desde el pasaporte).
La característica mecánica, construida de esta manera, se llama natural. Al cambiar otros parámetros puede obtener una característica mecánica artificial.
Los resultados obtenidos brindan la oportunidad de analizar y coordinar las propiedades mecánicas del motor y del mecanismo de trabajo.
Característica electromecánica
Representa la dependencia de la velocidad angular de rotación de la corriente del estator. Usando varios puntos de referencia se puede construir una característica electromecánica. La corriente nominal se calcula mediante la fórmula:

La corriente de reposo es 30-40% de la nominal.
Fórmula de cálculo para deslizamiento crítico:

Actual en el tiempo de inicio:

Todos los valores reflejan las características electromecánicas.
Características de funcionamiento
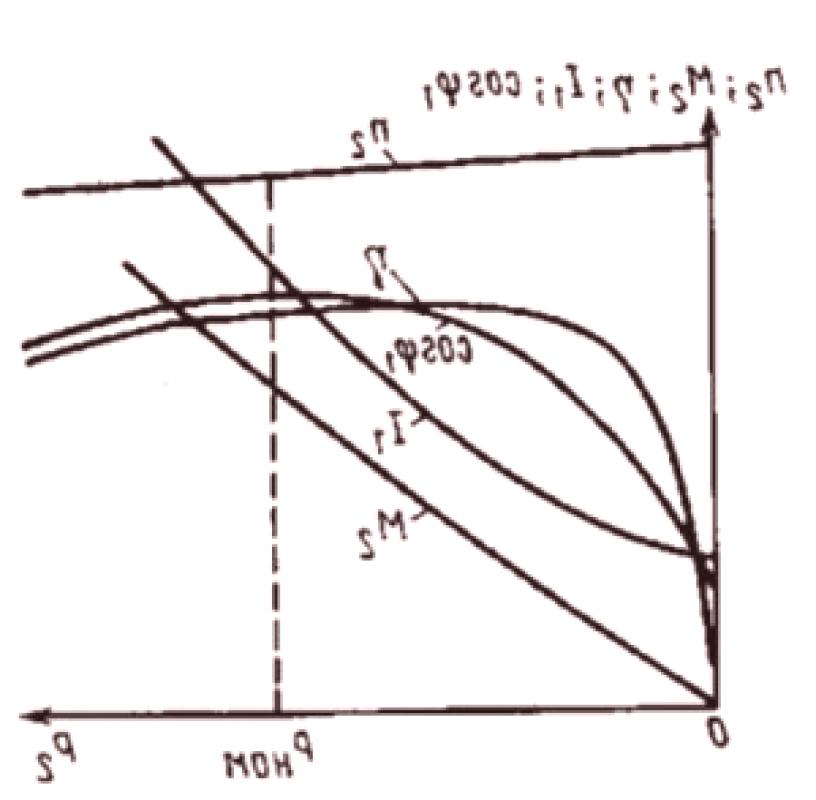 Las características operativas de un motor eléctrico asíncrono son la interconexión de varios parámetros de la potencia útil P2. Incluyen: la frecuencia de rotación del rotor n2, el momento en el eje M, el deslizamiento S, la corriente del estator I1, la potencia P, el factor de potencia SOSf y la eficiencia consumida.
Las características operativas de un motor eléctrico asíncrono son la interconexión de varios parámetros de la potencia útil P2. Incluyen: la frecuencia de rotación del rotor n2, el momento en el eje M, el deslizamiento S, la corriente del estator I1, la potencia P, el factor de potencia SOSf y la eficiencia consumida.
Por otra parte, la frecuencia de la corriente eléctrica y la tensión sin cambios, ena diferencia de la carga.
Normalmente, el rendimiento de un motor asíncrono se construye en el rango de valores de deslizamiento de 0 a un valor que supera el nominal en un 10%. Esta es la zona donde la máquina funciona de manera constante.
La velocidad de rotación del rotor n2 disminuye al aumentar la carga en el eje. Pero estos cambios no superan el 5%. La corriente I1 aumenta, ya que con un aumento adicional en la carga, su componente activo excede el reactivo.
SOSf a ralentí es pequeño. Pero entonces él crece. En cargas altas, SOSf disminuye debido al aumento en el devanado del rotor de la resistencia del chorro.
La eficiencia del ralentí es igual a 0. Al aumentar la carga, se observa un fuerte aumento y, posteriormente, disminuye.