La aparición de motores turbulentos debido a la necesidad de crear una máquina eléctrica con muchas ventajas. El motor turborreactor es un dispositivo sin colector, cuya función es asumida por la electrónica.
BCEPT: los motores eléctricos de CC de tiempo completo pueden ser de energía, por ejemplo, 12, 30 voltios.
- Selección del motor correspondiente
- Principio de trabajo
- Dispositivo BCEPT
- Sensores y su ausencia Sensor Hall. Usa el sensor de posición con el microcontrolador.
- Sensor Hall
- Uso del sensor de posición con el microcontrolador
- Falta de sensor
- El concepto de frecuencia PWM
- sistema Arduino
- Montaje del motor
Elegir el motor apropiado
Para recoger la unidad, es necesario comparar el principio de funcionamiento y las características de los motores de colector y colector.

De izquierda a derecha: motor colector, inmovilizador FC 28-12
Los colectores son menos, pero desarrollan una velocidad de rotación de par bajo. Funcionan a partir de corriente continua, tienen un pequeño peso y tamaño, reparaciones disponibles para reemplazar piezas. La manifestación de la calidad negativa se manifiesta cuando se recibe una gran cantidad de revoluciones. Los cepillos están en contacto con el colector, causando una fricción que puede dañar el mecanismo. La eficiencia de la unidad se reduce.
Los cepillos no solo requieren reparación debido al rápido desgaste, sino que también pueden provocar un sobrecalentamiento del mecanismo.
La principal ventaja de un motor de CC sin colector es la ausencia de contactos de par y la conmutación. Significa la ausencia de fuentes de pérdidas, como en motores con imanes permanentes. Sus funciones son realizadas por los transistores de la OIT. Anteriormente su valor era alto, por lo que no estaban disponibles. Hoy en día, el precio se ha vuelto aceptable y las tarifas han mejorado significativamente. En ausencia de un sistema de radiador, la potencia está limitada a 2.5 a 4 vatios, y la corriente es de 10 a 30 amperios. La eficiencia de los motores eléctricos fullless es muy alta.
La segunda ventaja es el ajuste de la mecánica. El eje está montado sobre los rodamientos. No hay elementos rotos y borrados en la estructura.
El único inconveniente es la costosa unidad de control electrónico.

Cable 690
Considere un ejemplo de mecánica CNC con un husillo.
El reemplazo del motor del colector en el mamparo protegerá contra la rotura del husillo para CNC. Debajo del husillo hay un soplador con giro a la derecha e izquierda del par. El husillo para CNC tiene una gran potencia. La velocidad del par es controlada por el servocontrol, y la velocidad es controlada por un controlador automático. El costo de CNC con un husillo de unos 4 mil rublos.
Principio de trabajo
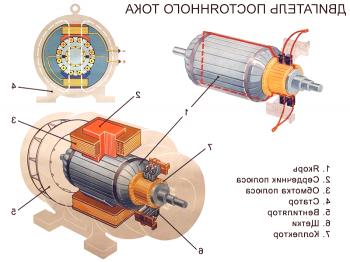
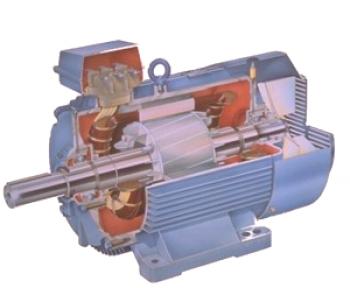
La principal característica del mecanismo es la ausencia de un colector. Y los imanes permanentes están instalados en el eje, y hay un rotor. A su alrededor hay bobinados cableados con diferentes campos magnéticos. La diferencia entre los motores colectores de 12 voltios es el sensor de control del rotor, ubicado ena el Las señales se envían al controlador de velocidad.
dispositivo BCEPT
La disposición de los imanes dentro del estator se usa comúnmente para motores de dos fases con un pequeño número de polos. El principio de torque alrededor del estator se usa si es necesario para obtener un motor de dos fases con pequeñas revoluciones.
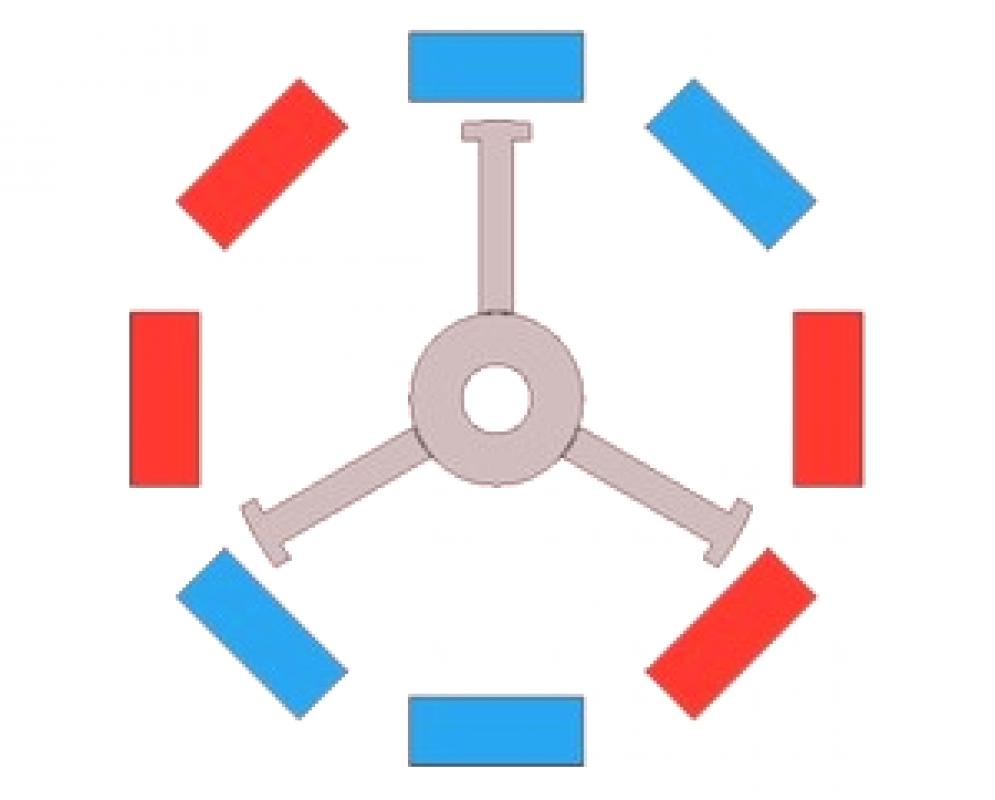 Hay cuatro polos en el rotor. Se colocan imanes en forma de rectángulo, alternando polos. Sin embargo, no siempre el número es igual al número de polos de los imanes, que puede ser 12, 14. Pero el número de polos debe ser par. Varios imanes pueden ser un polo
Hay cuatro polos en el rotor. Se colocan imanes en forma de rectángulo, alternando polos. Sin embargo, no siempre el número es igual al número de polos de los imanes, que puede ser 12, 14. Pero el número de polos debe ser par. Varios imanes pueden ser un polo
La imagen muestra 8 imanes que forman 4 polos. El momento de la fuerza depende de la potencia de los imanes.
Sensores y su ausencia
Los reguladores de marcha se dividen en dos grupos: con el sensor de posición del rotor y sin él.
Las fuerzas de fuerza se aplican a los devanados del motor en una posición especial del rotor, que está determinada por el sistema electrónico que usa el sensor de posición. Vienen en muchos tipos. El popular controlador de trazo es un sensor de efecto Hall discreto. En el motor, se utilizarán tres sensores para tres fases de 30 voltios. La unidad electrónica tiene constantemente datos sobre el estado del rotor y envía la tensión en el tiempo al bobinado requerido.
Sensor Hall
 Las adaptaciones más comunes que cambian sus hallazgos al cambiar de bobina.
Las adaptaciones más comunes que cambian sus hallazgos al cambiar de bobina.
El dispositivo con lazo abierto mide la corriente, la frecuencia de rotación. Los canales PWM están conectados a la parte inferior del sistema de control.
Tres entradasUniendo el sensor de Hall. En caso de cambiar el sensor Hall, comienza el proceso de procesamiento de interrupción. Para proporcionar una respuesta rápida para interrumpir el procesamiento, el sensor Hall está conectado al puerto junior del puerto.
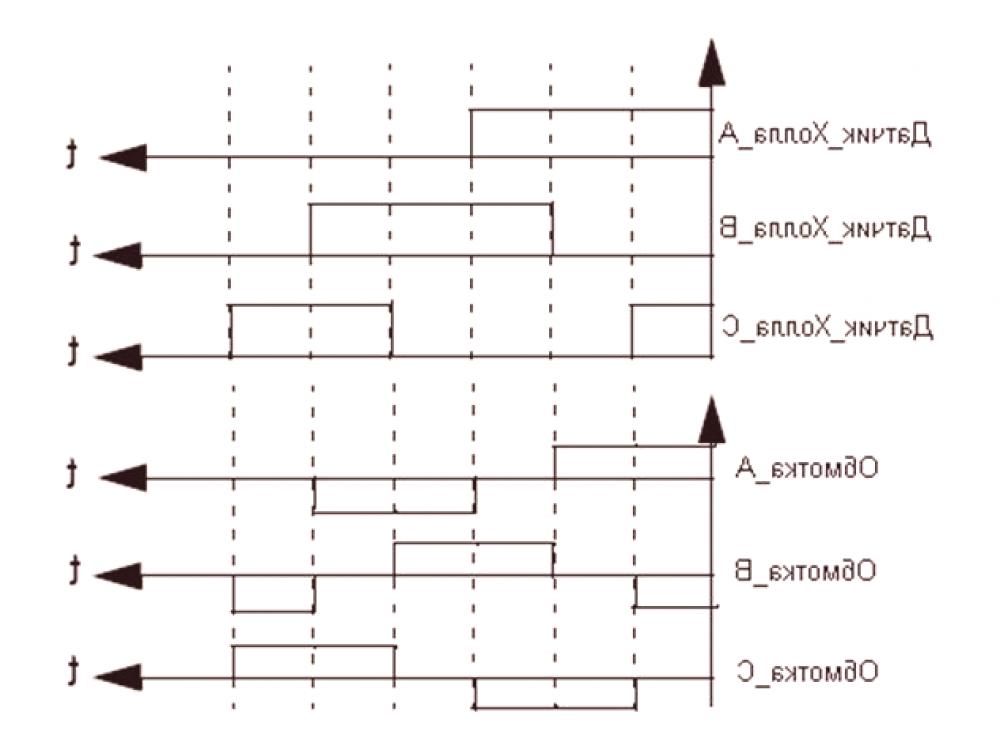
Señales de sensor Hall en rotación
Uso del sensor de posición con el microcontrolador
microcontroladores AVR de la firma Atmel
El controlador de potencia de la cascada se encuentra en el núcleo del núcleo AVR, que proporciona un control competente del motor del colector de CC. AVR es un chip para realizar ciertas tareas.
El principio de funcionamiento del regulador puede ser con el sensor y sin él. El programa de la placa AVR realiza:
- arrancar el motor lo más rápido posible sin el uso de dispositivos auxiliares externos;
- para controlar la velocidad de un potenciómetro externo.

Unidad de control electrónico para CMA LG 6871ER1007C
Un tipo separado de control automático sm, usado en lavadoras.
Falta de sensor
 Para determinar la posición del rotor, es necesario medir la tensión en el devanado no utilizado. Este método se utiliza para la rotación del motor, de lo contrario no funcionará.
Para determinar la posición del rotor, es necesario medir la tensión en el devanado no utilizado. Este método se utiliza para la rotación del motor, de lo contrario no funcionará.
Los reguladores de velocidad idénticos se hacen más fáciles, lo que explica su uso generalizado.
Los controladores tienen las siguientes propiedades:
- el valor del máximo dc;
- el valor de la tensión máxima de trabajo;
- número de vueltas máximas;
- resistencia de las teclas de potencia;
- frecuencia de pulsos.
EnLa conexión del controlador es importante para que los cables sean lo más cortos posible. Debido a la ocurrencia de lanzamientos al inicio de la corriente. Si el cable es largo, puede haber errores en la determinación de la posición del rotor. Por lo tanto, los controladores se venden con un cable de 12 a 16 sm.
Los controladores tienen muchos ajustes de software:
- control de parada del motor;
- apagado suave o duro;
- frenada y parada suave;
- por delante de la potencia y la eficiencia;
- comienzo suave, duro, rápido;
- limitación de corriente;
- modo de gas;
- cambio de dirección.
Controlador LB11880
El controlador LB11880, que se muestra en la imagen, contiene un controlador para un motor colector de alta potencia, es decir, puede arrancar el motor directamente al chip sin controladores adicionales.
El concepto de frecuencia PWM
Cuando las teclas están encendidas, la carga completa se aplica al motor. La unidad alcanza velocidades máximas. Para operar el motor, debe proporcionar un regulador de potencia. Exactamente esto se hace mediante la modulación de ancho de pulso (PWM).
Se establece la clave de apertura y cierre requerida. El voltaje varía de cero a trabajar. Para controlar la rotación, es necesario aplicar una señal PWM a las señales clave.
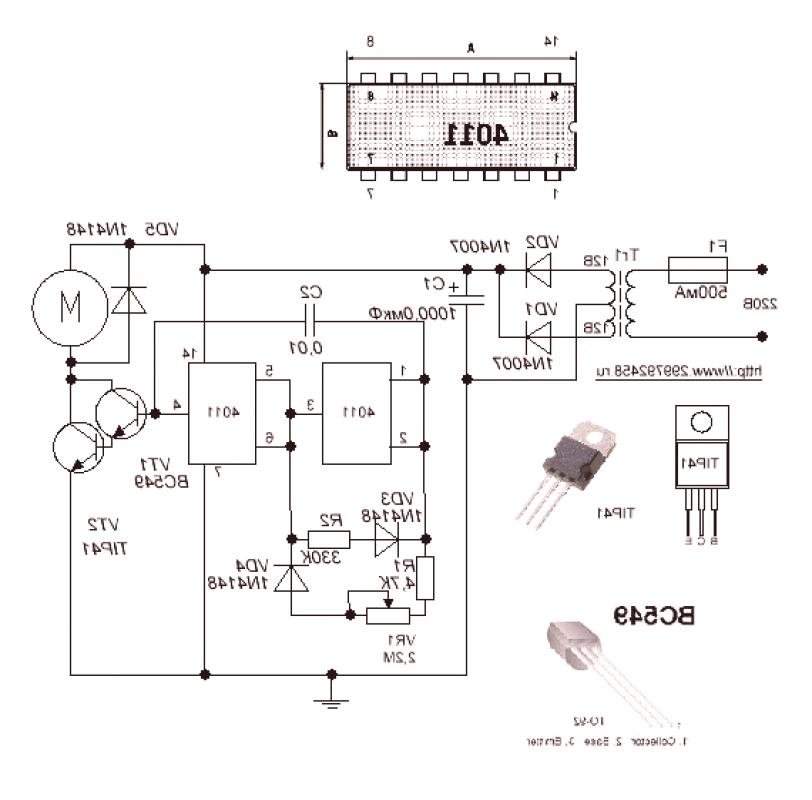
Esquema del regulador del motor de CC para voltaje de 12 voltios
La señal PWM puede formarse por varias conclusiones. O cree un PIM para un programa clave separado. El esquema se vuelve más fácil. La señal PWM tiene 4-80 kilohertz.
aumentar la frecuenciaconduce a un mayor número de procesos de transición, lo que resulta en la asignación de calor. La altura de la frecuencia PWM aumenta el número de procesos transitorios, lo que resulta en la pérdida de claves. Una pequeña frecuencia no proporciona la suavidad requerida de control.
Para reducir la pérdida de claves en procesos transitorios, las señales PWM se envían a las claves superior o inferior por separado. Las pérdidas directas se calculan mediante la fórmula P = R * I2, donde P es la capacidad de pérdida, R es la resistencia de la tecla, I es la intensidad de la corriente.
Menos resistencia minimiza la pérdida, aumenta la eficiencia.
sistema Arduino
A menudo, la plataforma informática de hardware arduino se utiliza a menudo para controlar los motores a reacción. La base es la placa y el entorno de desarrollo en el lenguaje Wiring.
La placa arduino incluye el microcontrolador AVR de Atmel y la unión elemental de la programación y las interfaces del circuito. El tablero tiene un regulador de voltaje. Serial Arduino Card es un esquema de inversión simple para convertir señales de un nivel a otro. Los programas se instalan vía USB. Algunos modelos, como el Arduino Mini, requieren una tarifa de programación adicional.
El lenguaje de programación Arduino utiliza el procesamiento estándar. Algunos modelos de arduino le permiten administrar múltiples servidores al mismo tiempo. El software procesa el procesador y compila AVR.
Los problemas con el controlador pueden ocurrir debido a fallas de voltaje y sobrecarga.
Montaje del motor

Motorama 45/50/58
Motor-motor para montar el motor. Se aplica a la configuración del motor. El motor esta interconectadoVarillas y elementos de marco. Los motores son elementos planos, espaciales. Un motor de un solo motor es de 30 voltios o varios dispositivos. Los motores del circuito de potencia consisten en un conjunto de varillas. El motor está instalado en combinación de elementos de granja y marco.
Un motor de CC inamovible es una unidad indispensable, que se utiliza tanto en el hogar como en la industria. Por ejemplo, máquina herramienta CNC, equipos médicos, mecanismos automotrices.
BCEPT se distingue por su fiabilidad, principio de funcionamiento de alta precisión, control automático inteligente y regulación.